Противокорабельные и тактические ракеты малой и средней дальности
Бог СОЗДАЛ людей, агосподин Кольт СДЕЛАЛ ихравными
Введение
Сейчас, в Мире раз за разом создается ситуация когда в варварство втаптываются страны, единственная вина которых в том, что они не способны себя защитить от более технологично вооруженного агрессора, прикрывающего свои криминальные акции социальной демагогией.
Возникает естественные вопрос - а нельзя ли эти высокие технологии переработать так, чтобы они стали доступны многим!?
Часть первая: особенности конструкции и двигателя
За основу конструкции ракеты, пригодной для поражения различных целей в режиме "поверхность-поверхность" взято конструктивное решение ракеты "Брамос".
(я сразу предупреждаю возникающие вопросы - Я никогда не участвовал в конструировании ракет и вся информация, которой я пользуюсь, из открытой печати)
Такой тип ракет, двигающихся с высокими сверхзвуковыми скоростями, позволяет уверенно поражать практически все типы морских и наземных целей, преодолевая противовоздушную оборону противника.
Почему малые страны не используют такие системы для своей защиты!?
Слишком дорого и страна-агрессор, подготавливая нападение, сознательно вводит барьер на доступ к высоким технологиям для своих потенциальных жертв.
В чем технологические проблемы таких ракет!?
Практически только в решении трех задач -
Доступный двигатель;
Доступная схема управления;
Доступная концепция наведения
В чем заключалась моя задача!?
В разработке концепции, адаптирующей существующие технологии под возможности малых стран.
Ракета выполнена по комбинированной схеме, которую я уже рассматривал в статье "преодоление противоракетной обороны противника" - прямоточный реактивный двигатель, с дополнительным инжектированием входного воздушного потока струей газов, дополнительного реактивного двигателя.
Почему именно эта схема!?
Турбореактивный двигатель, пригодный для таких систем очень дорог и его выпускает очень ограниченное количество стран.
Чисто пороховой двигатель требует применения высокоэнергетических порохов, механические характеристики которых позволяют осуществлять длительное горение с высокими давлениями и температурой.
Возможностями работать с такими технологиями тоже обладает ограниченное количество стран.
Применяемая мной схема позволяет использовать технологичные малоимпульсные пороха в качестве инжектора-нагнетателя для прямоточного двигателя, создавая рабочую тягу на средних и высоких скоростях за счет сгорания воздушно-керосиновой смеси.
Схема прямоточной составляющей ракетного двигателя так же упрощается, так как подпор воздушного потока исключает "пампаж" при маневре с высокой перегрузкой, а пламя порохового двигателя, содержащее каталитические компоненты, стабилизирует горение в форсажной камере.
Ракета не имеет управляющих плоскостей или двигателей системы управления.
Ориентация ракеты в пространстве происходит за счет деривационного взаимодействия вращающегося корпуса ракеты с набегающим воздушным потоком.
Вращение корпуса ракеты выполняется за счет насадок-лопастей, завихряющих струю из инжекторного сопла и соответственно реактивную струю всего двигательного комплекса
Начальный импульс для обеспечения такого взаимодействия и стабилизация ракеты в пространстве обеспечивается управляемым отклонением ротируемой с высокой скоростью боевой части, которая имеет значительный гироскопический эффект и нарушением осевой симметричности газовой схемы двигателя.
Особенности конструкции (пропорции отдельных элементов не соблюдены)
Ракета стартует из цилиндрического контейнера или из торпедного аппарата, пригодного к "горячему старту".
Старт осуществляется пороховым ускорителем, инсталлированным в форсажную камеру (на рисунке пороховой ускоритель отсутствует).
В пороховом ускорителе применяется та же технологическая схема организации "пороховой шашки", которая будет описана ниже.
После выхода из стартового контейнера и набора скорости примерно до 250-300км/ч, включается основной пороховой двигатель и раскаленные газы отбрасывают отработавший стартовый ускоритель.
После сброса стартового ускорителя, начинается подача жидкого топлива.
В качестве жидкого топлива вполне можно использовать обычный авиационный керосин.
Подача идет в два этапа.
На первом, на дозвуковой или низкой сверхзвуковой скорости - непосредственно в форсажную камеру.
На высокой сверх звуковой скорости - в воздушный канал перед инжекторным соплом, под высоким давлением, в виде динамических лопастей.
Особенности работы двигателя
В качестве дополнительного двигателя выбран пороховой ракетный двигатель, использующий в качестве окислителя - "перхлорат", в качестве первого компонента топлива алюминий, а в качестве второго компонента топлива и органической связки - каучуки.
Такие "шашки" для двигателя очень технологичны и дешевы, но, кроме низкого импульса и недостаточной скорости истечения газов обладают еще одной неприятной особенностью - они начинают "плыть" при высоких температурах под воздействием длительных механических нагрузок.
Чтобы компенсировать такую неприятную особенность перхлоратных порохов на органической связке, пороховая шашка выполнена в виде многослойного сэндвича, армированного алюминиевой сеткой, диагонального плетения.
"Шашка" закреплена в камере сгорания термостойким фреймом.
Тонкая алюминиевая сетка не влияет отрицательно на процесс горения, так как сами пороха такого состава используют в качестве одного из компонентов смеси алюминиевую пудру или полоски микронной фольги.
Сечение двигателя
Двигатель изготавливается в процессе намотки цилиндрического сэндвича из листов ракетного состава, проложенных тонкой алюминиевой сеткой, имеющей микронное медное напыление, с последующей опресовкой на матрице и вулканизацией.
Особенности изготовления двигателя
Часть вторая - Наведение и прорыв ПВО по спирали
В предыдущей главе я рассмотрел схемные и технологические решения, которые позволяют создавать в металле относительно несложные и недорогие ракеты малой и средней дальности, способные доставить 150-200кг боеголовку со скоростью 1.5-2 Маха на расстояние 150-300км
Современная ракета должна не только пролететь необходимое расстояние с необходимой скоростью - она должна преодолеть зону противоракетной обороны и поразить тяжелый авиа несущий корабль, ракетный комплекс или бункер управления.
Поэтому, применяемые на современных ракетных комплексах схемы наведение и аппаратура управления едва ли не большие секреты, чем сами ракеты.
Как правило, такая атака и прорыв обороны идет либо на сверхскорости - 3-5 Маха; либо на сверхмалой высоте, что требует совершенно уникальных систем управления.
Более того, страны, лидирующие по этим направлениям, используют либо спутниковые системы наведения или настолько продвинутую электронику и схемные решения, что ее фактически нереально повторить или получить малым странам.
Поэтому, решая такую задачу, я сделал упор на известную мне электронику, доступную на свободном рынке и использовал нестандартную схему движения и наведения ракеты - "наведение по спирали".
Что такое "наведение по спирали"!?
В принципе очень просто - ракета летит не по чистой, баллистической или атмосферно-баллистической траектории, а описывает вокруг нее спираль с раскрывом несколько десятков метров, так же вращаясь вокруг собственной оси.
Что это дает?
Во первых - перехват ракеты, которая идет к цели по такой траектории сразу осложняется в разы.
Дело в том, что для приборов ПВО цели, такая ракета, летящая по спирали "в лоб", выглядит как метка, ведущая маневр уклонения одновременно по трем координатам.
Во вторых - ракета может определять свои собственный координаты, используя метод триангуляции с широкой базы (крайние положения ракеты на каждом шаге спирали).
В третьих - сканеры для определения положения в пространстве и непосредственной, оптической наводки на цель работают в режиме простейшей линейной развертки, что в разы снижает сложность устройств и необходимое для устойчивой работы быстродействие.
Как обеспечивается такая специфическая траектория полета ракеты!?
Под деривацией снаряда, упрощенно понимают боковое отклонение снаряда от траектории полета, за счет его взаимодействия с набегающим воздушным потоком.
Артиллерийский снаряд, в простейшем случае, отклоняется в бок, но, если он способен управляемо менять угол альфа, то его траектория становится спиралью с центром на формализированной траектории полета.
Почему происходит такое отклонение снаряда!?
Использован так называемый Эффект Магнуса.
Это физика, которую изучают в школе, поэтому я ее описывать не буду.
Как реализуется этот эффект, в случае, описанной в первой части статьи ракеты!?
Ракета способна ставить свой корпус под некоторым, управляемым системой наведения углом к набегающему потоку, описывая управляемую, согласованную с шагом предполагаемой спирали прецессию.
Набегающий поток, расположенный под некоторым углом к вращающемуся корпусу создает за счет эффекта Магнуса аэродинамическую силу, согласованную по направлению и величине с реализованным, в этот момент, углом прецессии.
Как результат, ракета описывает на траектории полета управляемую спираль.
Вход в спираль и управление ее, дополнительно облегчается аэродинамической нестабильностью, вносимой расширенной задней частью ракеты.
Как осуществляется управляемая деривация аэродинамического корпуса ракеты!?
Как уже было сказано в первой части, в ракете два независимо вращающихся элемента - корпус ракеты, вращающийся с небольшой скоростью, основное назначение такого вращения это аэродинамическое взаимодействие с набегающим потоком, и ротируемая боеголовка, вращающаяся с высокой скоростью и обладающая значительным, в несколько сот килограмм гироскопическим эффектом.
Под действием привода управления, корпус, синхронно с положением на спирали, отклоняется по отношению к гиро стабилизированному центральному телу с боеголовкой.
Изменение/коррекция результирующей траектории полета происходит за счет введения дополнительного отклонения на определенном угле и шаге формируемой спирали.
Технологически, немаловажно то, что такая ракета не требует для своего управления отклонения струи двигателей, газодинамических или аэродинамических управляемых плоскостей.
Кроме того, отсутствие развернутых несущих поверхностей (крыльев) уменьшает заметность устройства для средств обнаружения противника и облегчает расчет обеспечения режима малой заметности
Траектория полета ракеты состоит из трех участков - пассивный участок, на котором ракета, стабилизируемая в полете только гироскопическим эффектом боеголовки, просто раскручивает спираль в направлении заданном стартовым устройством; участок наведения по "объекту привязки", на котором ракета выходит в зону захвата цели оптической головкой и участок оптического наведения.
В данной части я буду рассматривать "участок наведения по объекту привязки",
В качестве "объекта привязки" могут выступать астрономические объекты - солнце, луна, яркие звезды; шары зонды, несущие кодированный оптический маркер; проблесковые огни самолета, идущего в пределах зоны прямой видимости или четко выделяемые или несущие маркер объекты на поверхности суши или моря.
Ракета, с помощью простейшего, однокоординатного оптического сканера, расположенного на вращающемся корпусе ракеты определяет угол привязки и рассчитывает свое текущее положение.
Пусковое устройство передает в направлении нахождения ракеты оптическим или радио лучом информацию об изменении положения цели и, в случае использования подвижного "объекта привязки", учитывает в этой информации изменение положения "объекта привязки".
Пусковое устройство непосредственно не управляет движением ракеты, поэтому такой простейший сигнал является высоко помехозащищенным.
Информация, об изменении положения цели, получается или в результате авиа разведки, или, в случае работы по авиа несущему кораблю, в результате анализа информации с акустических буев.
Необходимая точность выхода в зону оптического захвата составляет +/ - 5км и вполне обеспечивается анализом информации с акустических буев
Часть третья - Наведение ракеты в инфракрасном диапазоне
Сначала я бы хотел коснуться предыстории этого алгоритма видиоанализа.
Создавался он мной не для ракет, а для опознавания цели и наведения оружия штурмового военного робота в 1988-1995 годах, поэтому графическая часть, которую я без переделки взял из своих старых материалов, и, соответственно, "железо", которое за ней стоит, переусложнена.
Для наведения ракеты, ведущей атаку на звено кораблей или наземную цель, такая система видеоанализа намного проще и дешевле.
В основу алгоритма положен бионический принцип, основанный на первичном анализе сложного изображения человеческим глазом.
Меня всегда развлекали заумные рассуждения напыщенных петухов от науки на тему опознавания человеческим глазом изображения.
Сначала это были переписываемые друг у друга спекуляции о том как мозг в истерике сравнивает миллионы картинок запечатленных на сетчатке, потом, когда появилось слово алгоритм, пошел разговор, естественно, об алгоритме сравнения картинок, так же запечатленных на сетчатке...
В общем, заумный наукообразный бред за государственный счет.
Природа очень скупа и никогда не оперирует миллионами фрагментов информации, когда можно сравнивать сотни.
Я не полез разбираться, как именно природа это делает, а просто прикинул, как бы это сделал я, обладая такими же куцыми возможностями.
Оказалось очень просто, малозатратно и, что самое главное, первые приближенные результаты выдаются уже в начальный момент анализа.
Так возник алгоритм сканирования и сравнения изображения с помощью замкнутых (начало с концом) кольцевых кодов описывающих выделение по последовательно усложняющейся схеме (по разрешению) границ яркости в нужном оптическом диапазоне.
Полученный уже на первом витке сканера простейший код сравнивается со ВСЕМИ имеющимися в памяти кодами по параллельной схеме.
Те структуры памяти, в которых этот вновь сформированный код дал ДОСТАТОЧНОЕ совпадения с ГРАНИЧНЫМ количеством кодов, записанных в памяти активизируются, остальные блокируются.
Как уже было сказано ранее, идет непрерывное получение промежуточных результатов, на основе которых человек или устройство может начать принимать решение.
На каждом, последующем, постепенно увеличивающим свое разрешение, шаге анализа все более и более конкретизируются те структуры, из которых состоит изображение и только на последнем этапе анализируются отличия, конкретно выбранного КОМПЛЕКСА структур от опознаваемого изображения.
То есть, большая часть анализа изображения происходит непосредственно в глазу или видиоанализаторе, передавая в мозг или процессор уже готовые к опознаванию группы кодов.
Выявление "отличия от существующего" для наведения ракеты или боеголовки не требуется, поэтому видиоанализатор вырождается в простейшее устройство.
Я еще раз обращаю внимание - Вся обработка информации идет по параллельной схеме, поэтому имеется очень высокое быстродействие и некритичность к единичному сбою или ошибке.
Такое устройство можно вполне скомпоновать на ширпотребовском "железе".
Как работает первичный оптический захват и выбор цели ракетой идущей по спирали!?
Инфракрасный сканер, осуществляющий сканирование в одной плоскости, расположен на внешнем, корпусе ракеты и осуществляет за счет его вращения полное радиальное сканирование.
Условно вся процедура захвата и выделения цели может быть разбита на четыре основных этапа.
Первичный захват групповой цели (этап_0) осуществляется по условному уровню 0.707 без выделения контуров цели.
Второй этап - с минимальным разрешением производится разделение отдельных целей в пятне захвата.
Третий этап - выделяется по нескольким параметрам последовательность наиболее значимых целей.
Четвертый этап - производится сравнение кодов полученных при сканировании первой, в этой последовательности цели.
Если достаточного уровня совпадения не достигнуто - происходит переход на следующую цель, выбранную в последовательности.
Я еще раз обращаю внимания, что весь анализ идет параллельно и по усложняющейся схеме, поэтому результаты идут уже с первого момента и время анализа влияет только на точность выбора.
Так например - в результате ошибки, ракета не промахнется по кораблю, а может попасть взамен малого авианесущего корабля в близкий по размеру и форме теплового пятна танкер, идущий с составе ордера.
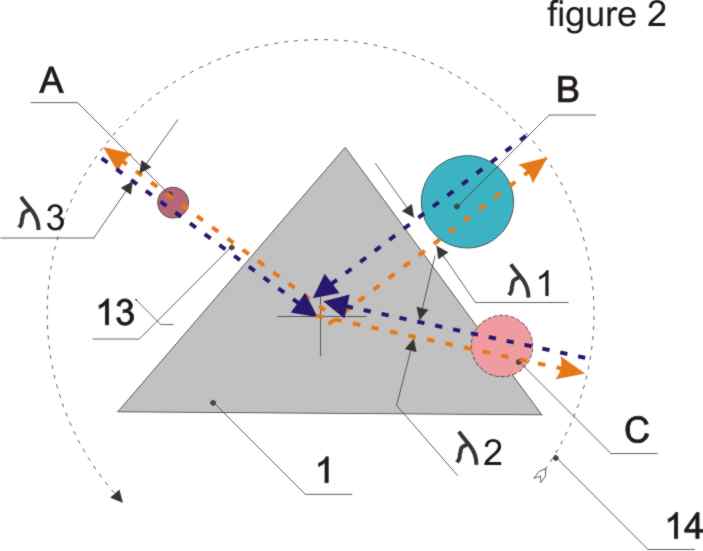
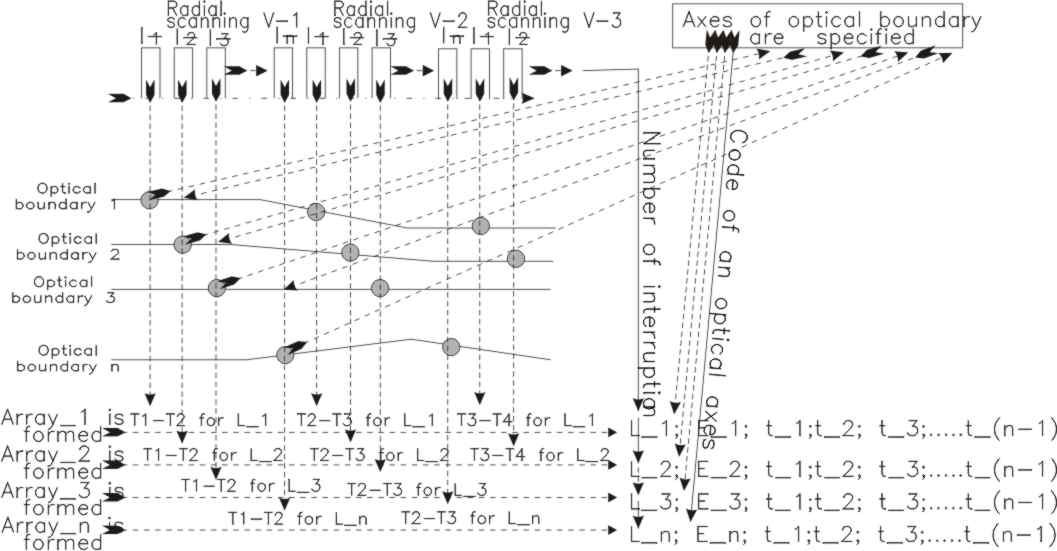
Как происходит сканирование и формирование кольцевых кодов.
Сравниваются отрезки, на которые разрываются отслеживаемым контуром два близлежащие, прямой и обратный ход развертки.
Анализ ведется одновременно несколькими оптическими приемниками разного разрешения и, возможно, диапазона.
Как видно на рисунках, с какой проекции рассматривается выделяемый контур - роли не играет.
Так например - треугольник под любым углом, кроме взгляда в торец плоскости - треугольник описываемый близкими группами цифр.
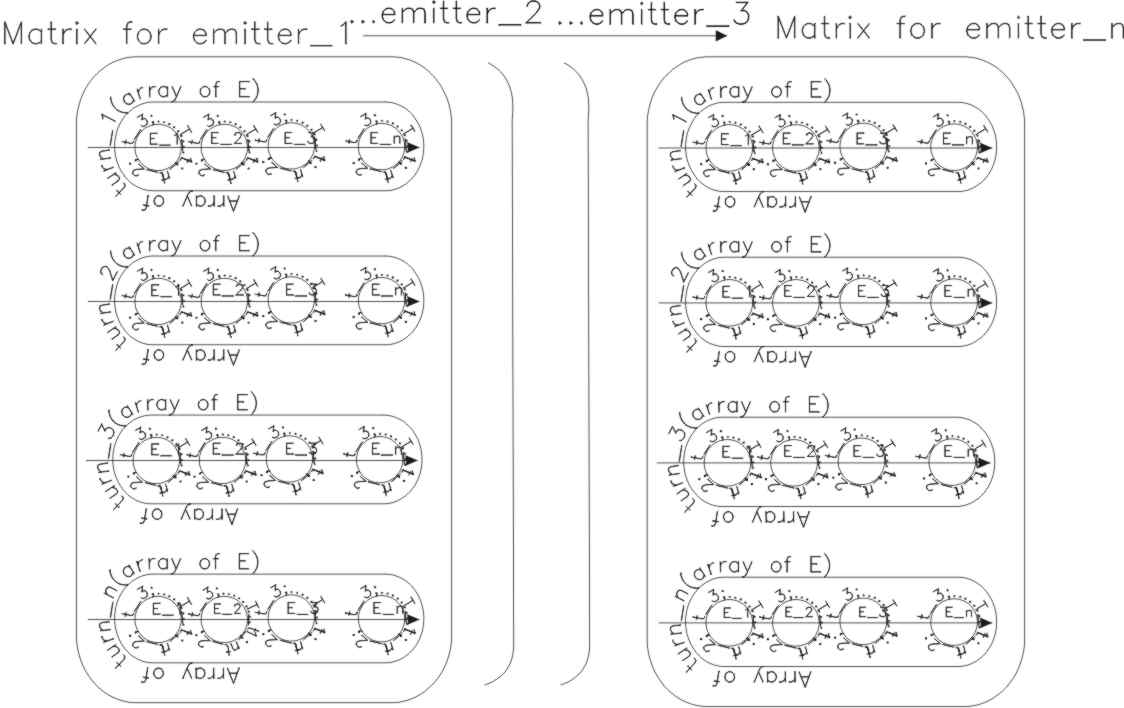
В результате такого непрерывно осуществляемого анализа получается непрерывно усложняемая группа кодов, организованная как матрицы или связные списки, несущие кольцевые коды.
Каждый вновь полученный код сравнивается с имеющимся в базе данных, по схеме, описанной в начале статьи и на каждом этапе анализа, начиная с первого, выдается команда на действие.