|
|
||
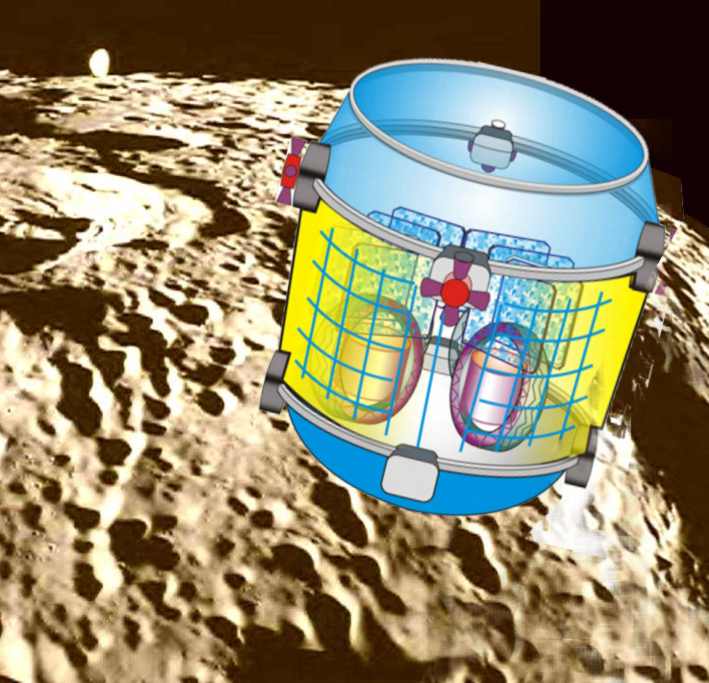
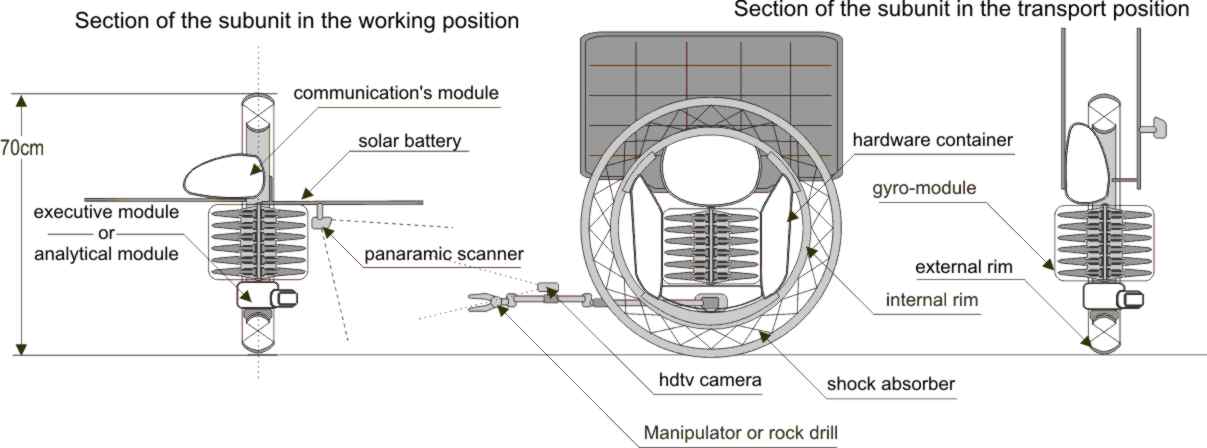
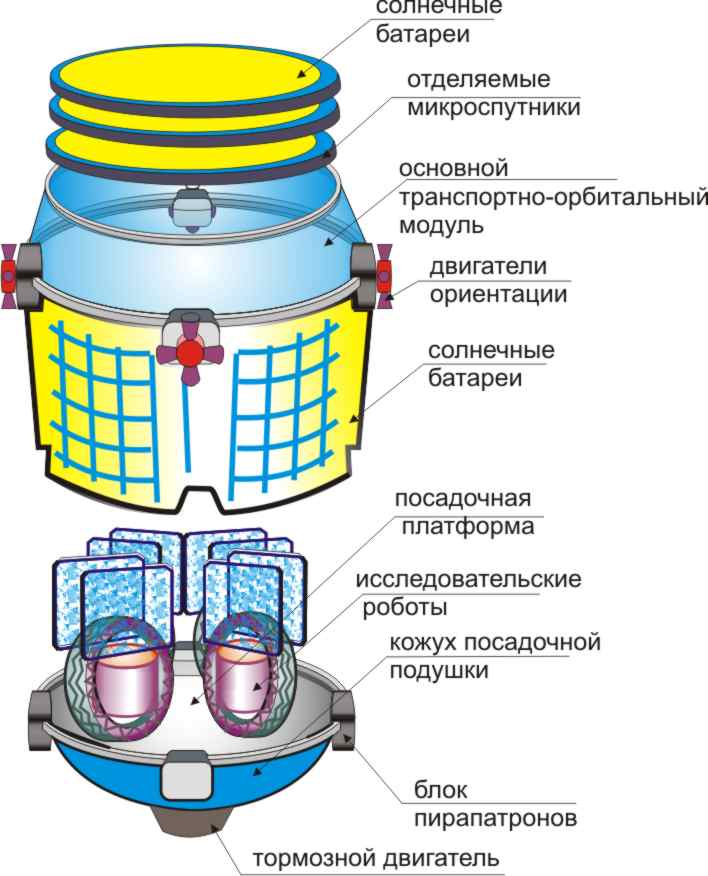
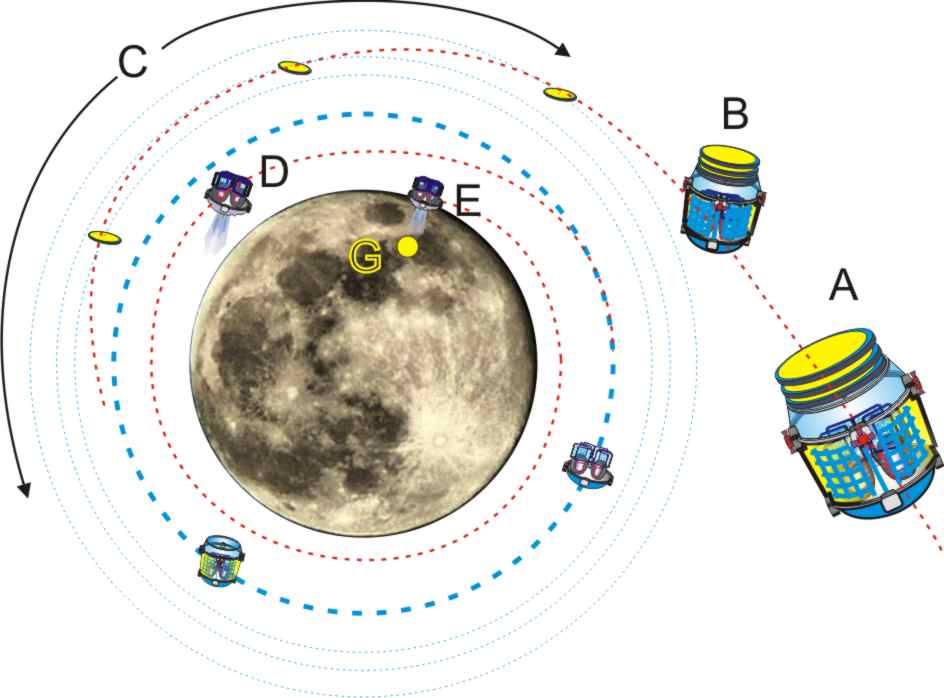
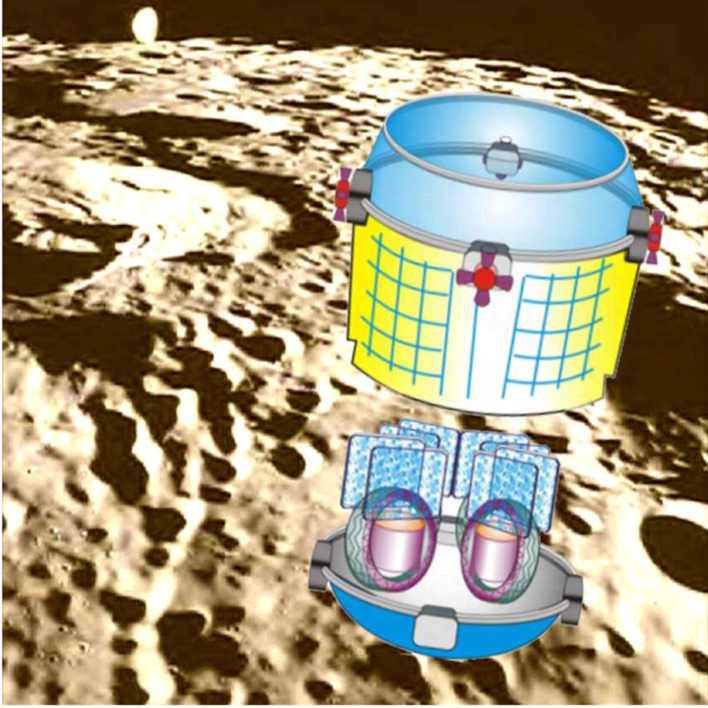
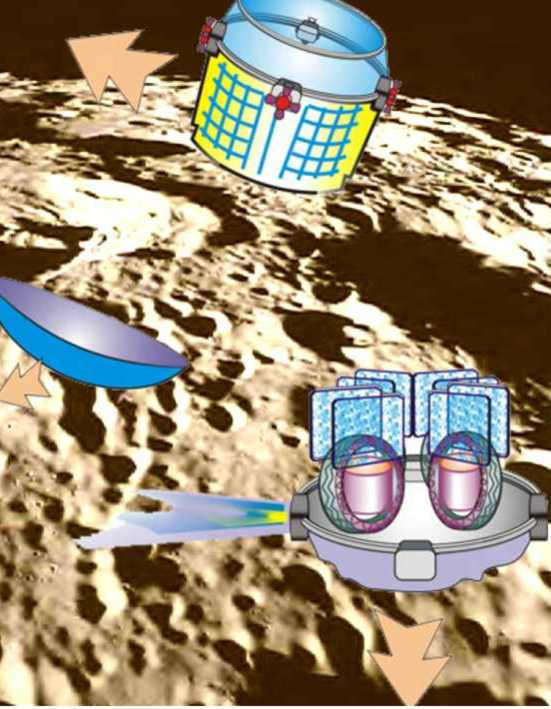
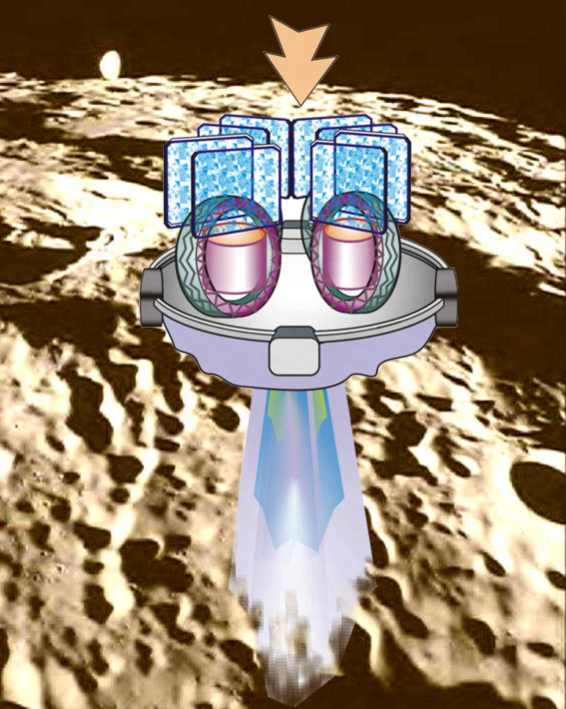
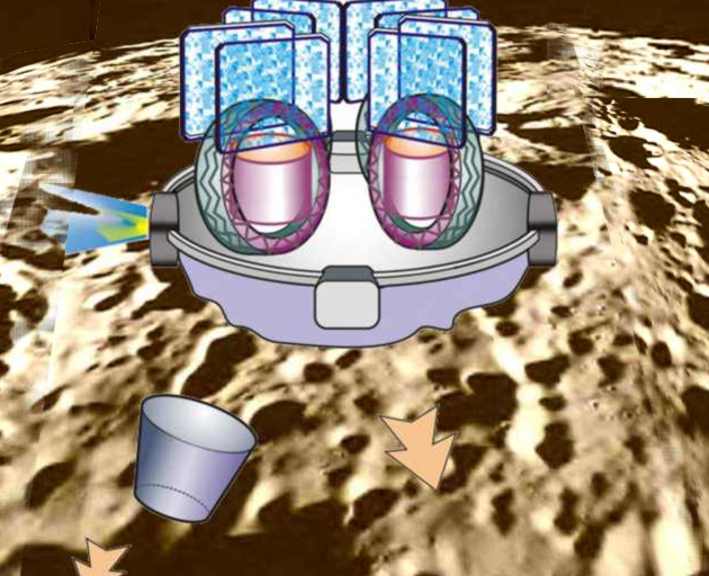
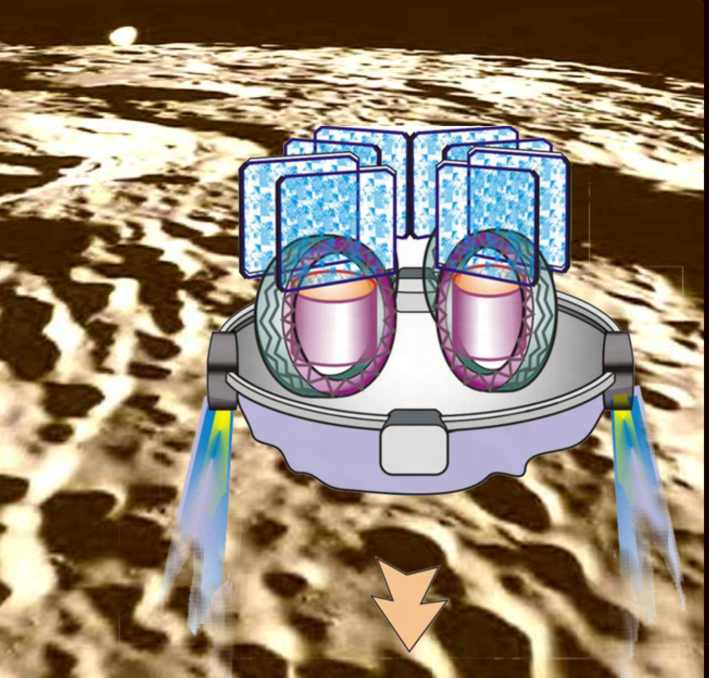
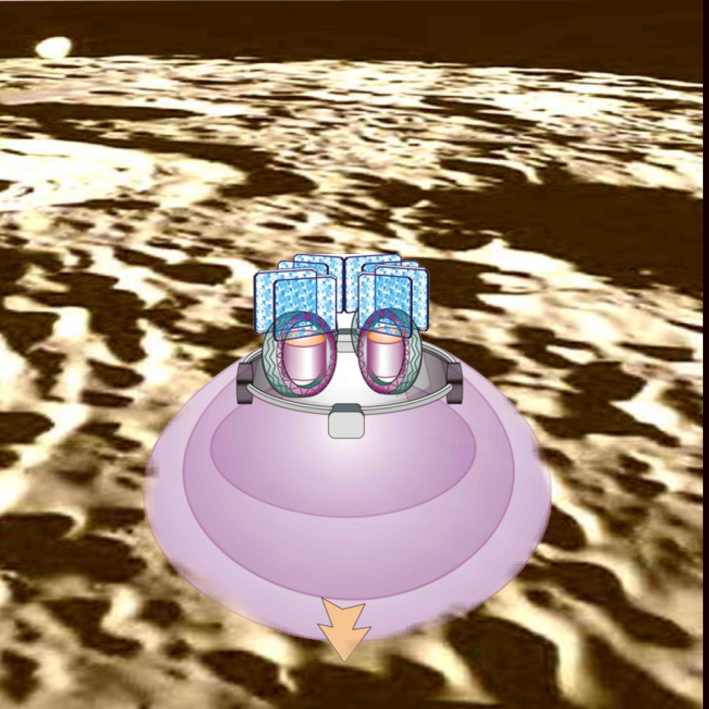
Случайно заметил, что в русскоязычном варианте моего раздела нет статьи - Продолжение темы "Составной робот, предназначенный для работы в условиях вакуума и низкой гравитации" Часть третья - Транспортный модуль То ли забыл залить, то ли нечаянно стер ... | ||
|