Использование систем радио подавления при прохождении противоракетной обороны противника
Прежде чем рассказать, как собственная система радиопротиводействия боеголовок летящих в составе "маневрирующей и перераспределяющей цели группы" обеспечивает прохождение системы ПРО вероятного противника, я коснусь сначала основ радиолокации и радиопротиводействия.
Принцип радиолокации очень прост - радиолокатор, сканируя пространство, посылает в сторону цели высокочастотный импульс и получает отраженное от него эхо. Тот угол/положение антенны, на котором радар принял сигнал, дает азимут к цели; разница между временем посылки и приема дает наклонную дальность.
В реальности, все конечно намного сложнее и количество определяемых параметров намного больше, но для корректного объяснения принципа этого достаточно.
Все бы было хорошо, но диаграмма излучения/приема антенны радара не идеальная фигура. Помимо основного луча, как говорят специалисты - лепестка, существуют еще и низко эффективные, боковые лепестки, расположенные под другими углами, воздействуя на которые сигналом помехи можно заставить оператора/ЭВМ увидеть несуществующую цель.
Существует правило - "квадрат-куб"
Если количество целей, реальных+ложных увеличивается в квадрате, то сложность перехвата увеличивается в кубе.
В неадаптивных системах старого типа, оператор/ЭВМ мог отсеивать такие ложные цели, так как параметры импульса помехи достаточно отличался от специфического импульса именно его радара.
В более поздних, адаптивных системах, постановщик помех анализировал особенности радарного импульса и имитировал помеху, как можно более похожую на реальную цель.
Защищаясь от такого воздействия, радары стали менять рабочую частоту и особенности импульса.
Началось соревнование, между системами ПРО и постановщиками помех - кто быстрей анализирует и выдает команду.
Но, при использовании для преодоления системы ПРО "маневрирующей и перераспределяющей цели группы", возникла еще одна возможность, при которой сами боеголовки, без использования "постановщика помех", способны в прицельном режиме подавлять систему обнаружения и наведения ПРО.
Причем, для управления этой функцией, им не требуются сверх быстродействующие ЭВМ и сложные блоки управления.
Я условно назвал этот метод "методом скользящего зеркала"
Боеголовка не имеет сложного модуля постановки помех.
В простейшем случае, это лампа бегущей волны, управление которой завязано на аппаратуру перераспределения целей, описанной в предыдущих частях.
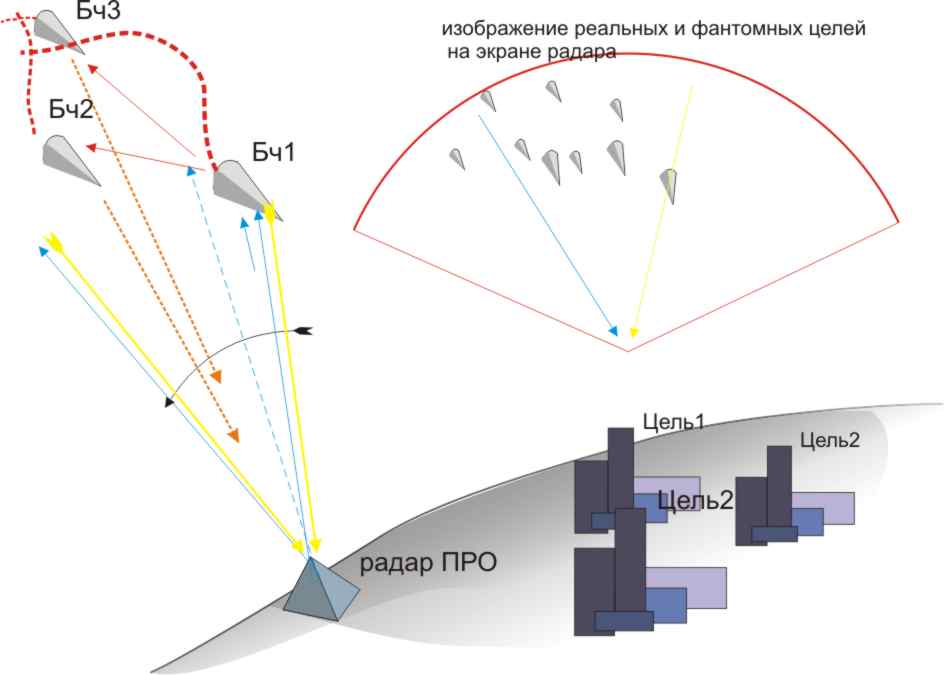
Поймав направленный на нее локационный сигнал ПРО противника, боеголовка просто переизлучает его другим боеголовкам своей группы, а они, так же без всяких изменений, излучают его в переднюю полусферу.
Так как скорость прохождения сигнала намного выше скорости сканирования, но конечна, оператор/ЭВМ видит не одну, а три, близко расположенные реальные цели.
Причем, так как боеголовки маневрируют и их позиции одна относительно другой постоянно меняются (меняется дистанция и соответственно время прохождения между ними сигнала), позиции этих целей так же не повторяют статистически свой прототип, а осуществляют независимые, реальные маневры.
Так как, так действует каждая боеголовка, то в случае прорыва системы ПРО тремя боеголовками оператор/ЭВМ видит девять реальных целей; в случае прорыва девятью (три ракеты носителя, по три боеголовки в каждой) - восемьдесят одну цель.
То есть, при увеличении числа боеголовок выше определенного предела, для поиска реальных целей и выработки команд для ракет перехватчиков быстродействие ЭВМ потребуется выше существующих на сегодня уровней быстродействия.
А ведь я рассматриваю случай, когда ракета носитель доставляет в зону ПРО только боеголовки без их физических имитаторов.
Подавление ближнего рубежа противоракетной обороны противника
В современных условиях, концепцию войны, ее этику и сопровождающую ее политическую ситуацию навязывает, как правило, более сильный и наглый противник, который прикрываясь псевдо демократическими лозунгами, ведет такую подготовку десятилетиями, планомерно ослабляя вероятного конкурента или страну не согласную с его политическим и экономическим доминированием.
В такой политической ситуации, вероятная жертва агрессии закономерно оказывается окружена военными базами вероятного противника и вынуждена наносить ответный удар в условиях, когда преодоление противоракетной обороны становится актуальным уже на самых первых этапах противостояния, то есть еще на своей территории.
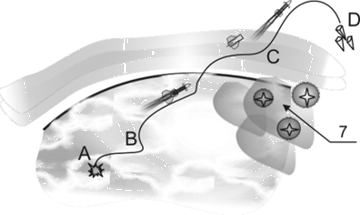
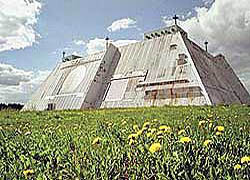
Большую роль в таком преодоление дальних рубежей противоракетной обороны противника играет уничтожение его радиолокационных и оптических станций, расположенных в окружающих страну военных базах (7).
При этом надо учитывать, что сами эти ракетные базы имеют собственную противоракетную оборону и прикрывающие их силы ПВО.
Удар по таким базам, расположенных вплотную к границам страны, должен осуществляться мобильными комплексами и средство поражения, которые не должно быть обнаружены до момента уничтожения цели.
Уничтожение таких баз желательно проводить оружием неядерного типа, чтобы не произвести заражение собственной территории, но достаточно мощным, для разрушения хорошо защищенных и долговременных сооружения одним ударом.
Баллистические ракеты малой и средней дальности плохо подходят для выполнения таких задач, так как легко засекаются как из космоса, так и оборонительными противоракетными системами ближнего радиуса действия и с большой вероятностью уничтожаются.
Кроме того, их возможности ограничены из за малого веса боевой части.
Важным требованием к такому оружию является полная автономность ее системы управления, не связанная с внешними сигналами управления и спутниковой навигацией.
Наиболее полно таким требованиям удовлетворяют крылатые ракеты, оснащенные мощной боевой частью объемного взрыва и способные двигаться на основном участке в режиме малой заметности на высоте 5-10 метров, с огибанием рельефа местности, и осуществлять сверх звуковой прыжок на последнем этапе, преодолевая рубеж ствольной артиллерии и ракет ПВО ближнего радиуса действия.
Наведение таких крылатых ракет желательно осуществлять по имеющееся в ее памяти карте местности, осуществляя привязку отслеживанием техногенных подписей - дорог, линий электропередач, полей и т д.
Полет с тяжелой боевой частью, на малой высоте и в режиме огибания рельефа местности, в стиле "летучая мышь", невозможно осуществить, используя обычный схемы аэродинамического управления.
Кроме того, переход в зоне поражения на сверхзвуковую скорость требует кардинального изменения геометрии устройства.
Наиболее полно таким требованиям удовлетворяет крылатая ракета или дрон, способный изменять геометрию отстрелом несущих плоскостей и управляемый изменением положения корпуса относительно ротируемой с высокой угловой скоростью боевой части, работающей как позиционирующий гироскоп.
Предложенная схема управления, посредством гироскопируемой боевой части и использование инжектируемых прямоточных двигателей не подверженных помпажу, предполагает возможность создать глиссирующие крылатые снаряды для сверхмалых высот (полёт в режиме экрана) выполняющие маневры, недопустимые при использовании аэродинамических управляющих плоскостей.
Это даст возможность выходить в район цели на высотах исключающих обнаружение снаряда посредством радара.
Отсутствие управляемых аэродинамических плоскостей позволяет изменять геометрию снаряда путем отстрела части несущей поверхности для прохождения высокоскоростного участка трассы.
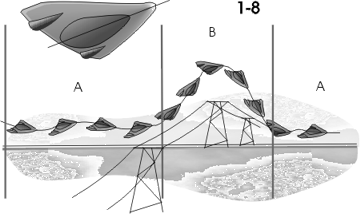
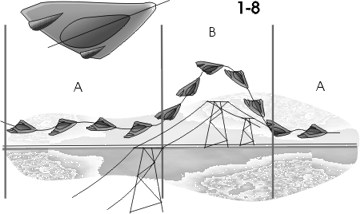
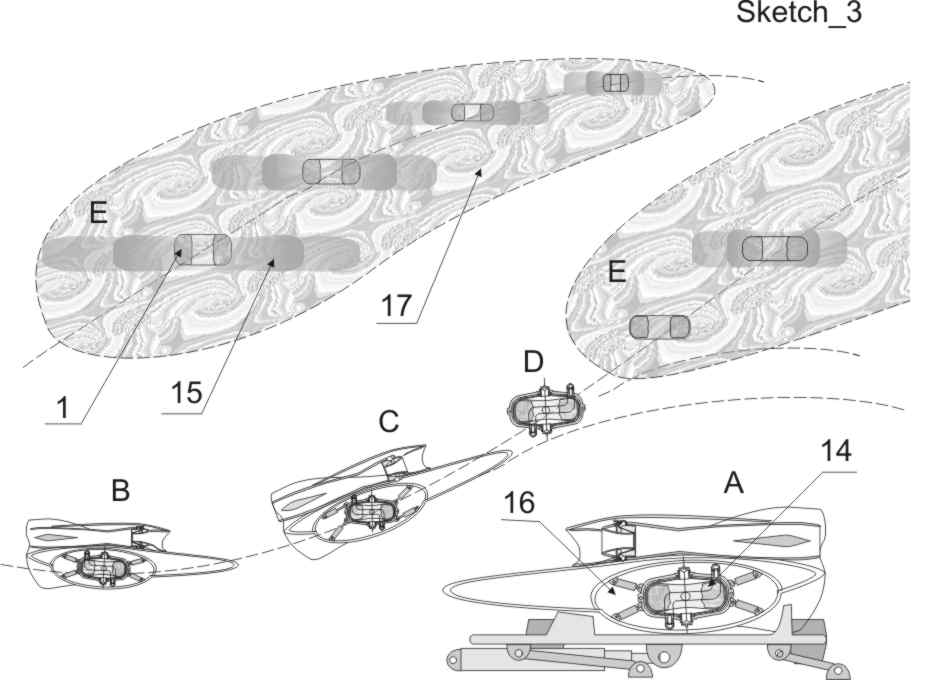
Наведение на низком участке полётной траектории осуществляется отслеживанием техногенных подписей. Например - покрытия шоссе или электромагнитные поля линий электропередачи (1-8-А). Точная привязка к карте местности осуществляется, в момент набора высоты для преодоления препятствия (1-8-B), с помощью видеоанализаторов без использования спутниковой системы навигации.
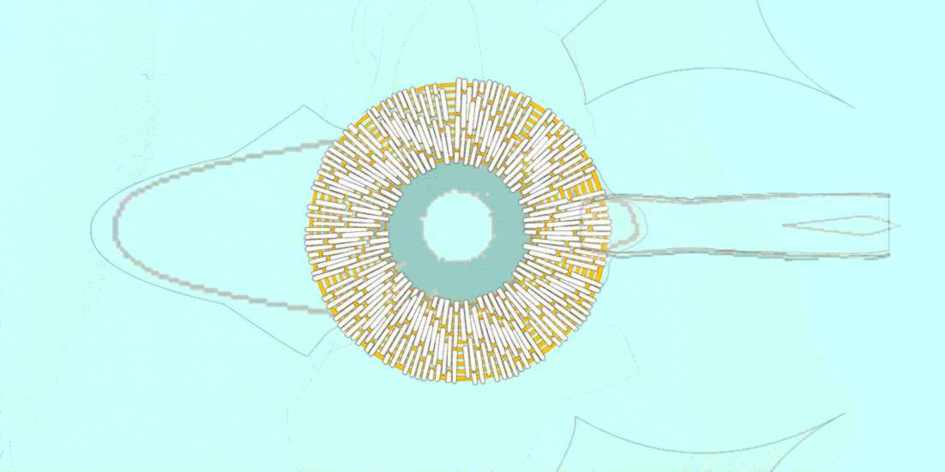
Боевой частью устройства служит боеприпас объемного взрыва, представляющий собой эластичный тороидальный контейнер в котором находится рабочее вещество или в форме желеобразной субстанции (1-3А) или в форме тороидальной катушки, намотанной методом бифилярной намотки из микронной магниевой ленты или аналогичного сплава с высокой энергией вспышки, также плавающей в компенсирующей желеобразной субстанции (sketch_1).
Тороидальный контейнер вращается с высокой скоростью внутри прочного, но хрупкого корпуса, опираясь на жидкостно или газо опорный подшипник, в качестве рабочего вещества такого подшипника может быть использован один из компонентов топлива.
После получения команды "на подрыв", подача рабочего вещества подшипника прекращается и/или происходит разрыв корпуса и тороидальный контейнер разрушается под действием центробежный сил и его содержимое перемешивается с воздухом в точке подрыва.
Exhibit_1 (extract)
... Для обеспечения необходимых рабочих параметров ротируемых элементов, разрушающие силы, возникающие в процессе выполнения рабочих функций, компенсируются в жидкостных или газовых опорных подшипниках.
... Корпус боевой части, заряд и внешний диск, имеющий противонаправленное вращение являются елементами несущей конструкции боеголовки.
... Генератор опрного слоя - конструктивный элемент корпуса боеголовки.
... Генерируемый опорный слое компенсирует возникшие усилия и передает их на корпус боеголовки.
... Предложенный метод управления полетом (поворот аэродинамического корпуса относительно гиростабилизируемой "плавающей" боеголовки) позволяет отказаться от не эффективных, на малых высотах или гиперзвуковых скоростях, аэродинамических управляющих плоскостей.
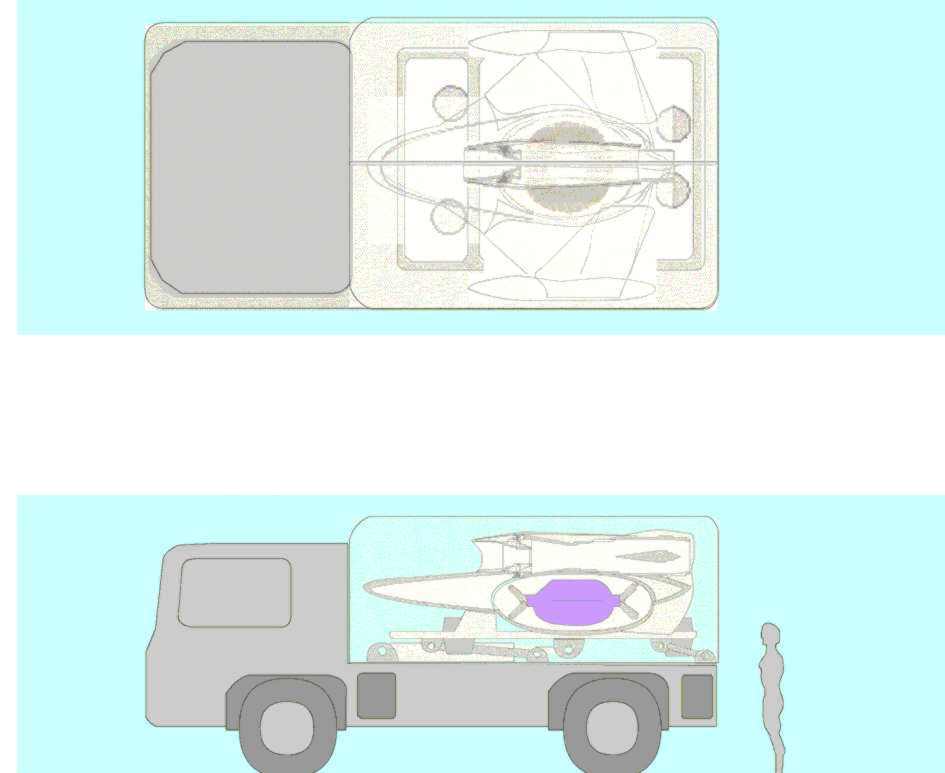
Давайте, рассмотрим действия ракетного комплекса, на базе среднего, гражданского, транспортного трака или автобуса, использующего автономный дрон, с зарядом объемного врыва весом 800 килограмм (вес активного заряда).
Я извиняюсь за качество рисунков - это распечатки интерактивного флэша/мультипликации и она плохо переводится в растровую графику.
Почему выбран именно гражданский трак или автобус!?
Ну, я думаю ни для кого не секрет, что сегодня любая операция страны агрессора или его военного блока начинается с плотного орбитального контроля наземного пространства противника.
В таких условиях, классические ракетные комплексы средней дальности отслеживаются и ведутся в автоматическом режиме.
Вероятный противник получает необходимую информацию еще до выхода комплекса на стартовую позицию и имеет возможность обработать данные, необходимые для перехвата еще до момента старта.
Гражданский трак или автобус меньше привлекает к себе внимание и имеет больше шансов выполнить неожиданный для противника старт дрона, который, из за особенностей своей полетной траектории, будет обнаружен слишком поздно, для его уверенного перехвата.
Дрон, имеющий полностью автономную систему запуска и ориентации в пространстве, в предстартовом положении находится внутри раскрывающегося корпуса, гражданского назначений.
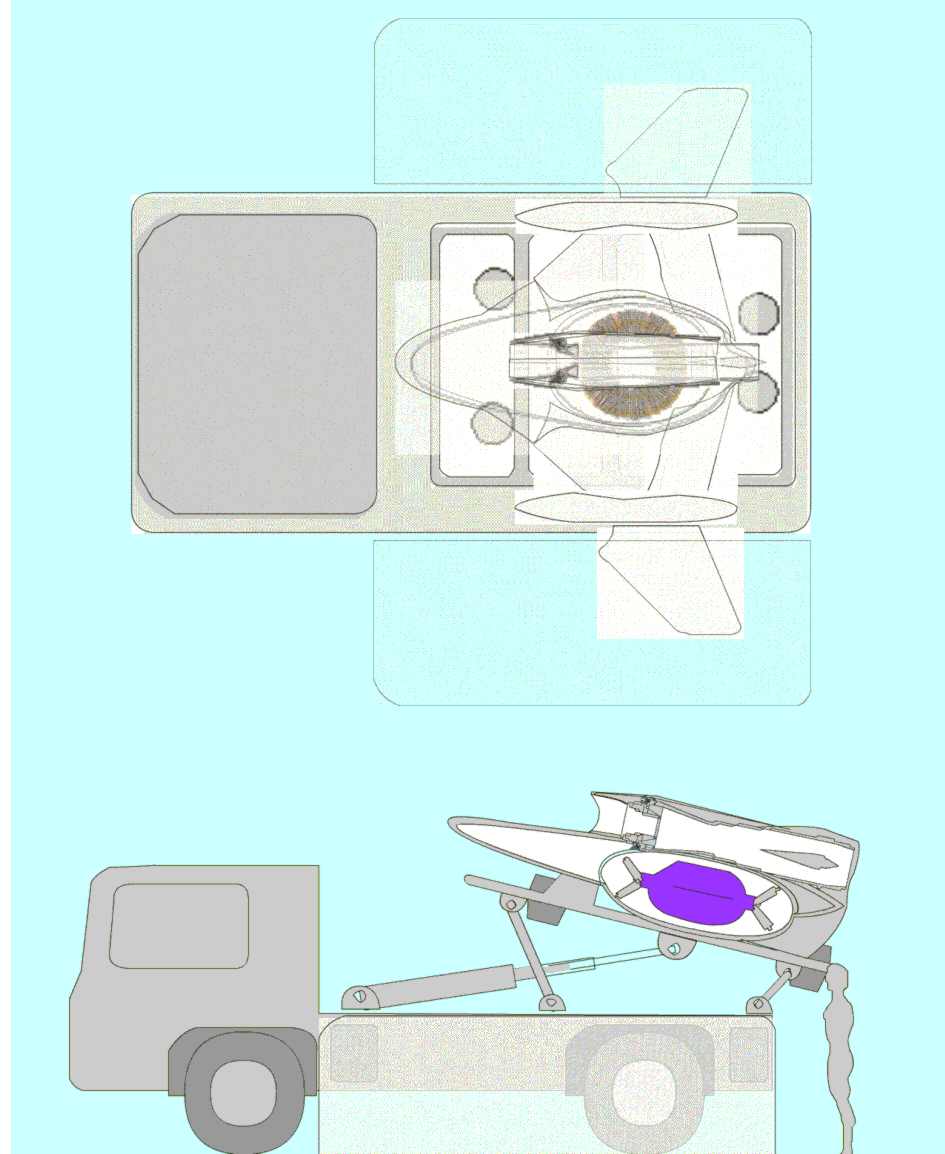
После выхода на стартовую позицию, корпус выводит и фиксирует аутригеры, раскрывается и простейшее гидравлическое стартовое устройство поднимает стартовую платформу с крылатым снарядом в рабочее положение.
После перевода стартового устройства в рабочее положение, платформа расцепляется со стартовым устройством и подготавливается расцепление стартовой платформы с дроном.
В случае необходимости, зависимости от типа дрона, может быть осуществлен перевод крыльев аппарата в стартовое положение.
Выполнить старт устройства весом около шести тонн, из трансформируемого стандартного, гражданского транспортного средства, имеющего грузоподъемность около десяти тонн, позволяет сама конструкция дрона.
Как я уже говорил в предыдущих главах, дрон не имеет управляющих аэродинамических плоскостей и его курсовое управление и стабилизация осуществляется позиционированием корпуса относительно боевого заряда, работающего как высокооборотный стабилизирующий гироскоп.
При такой схеме управления, стабилизация корпуса в пространстве осуществляется уже с нулевой скорости.
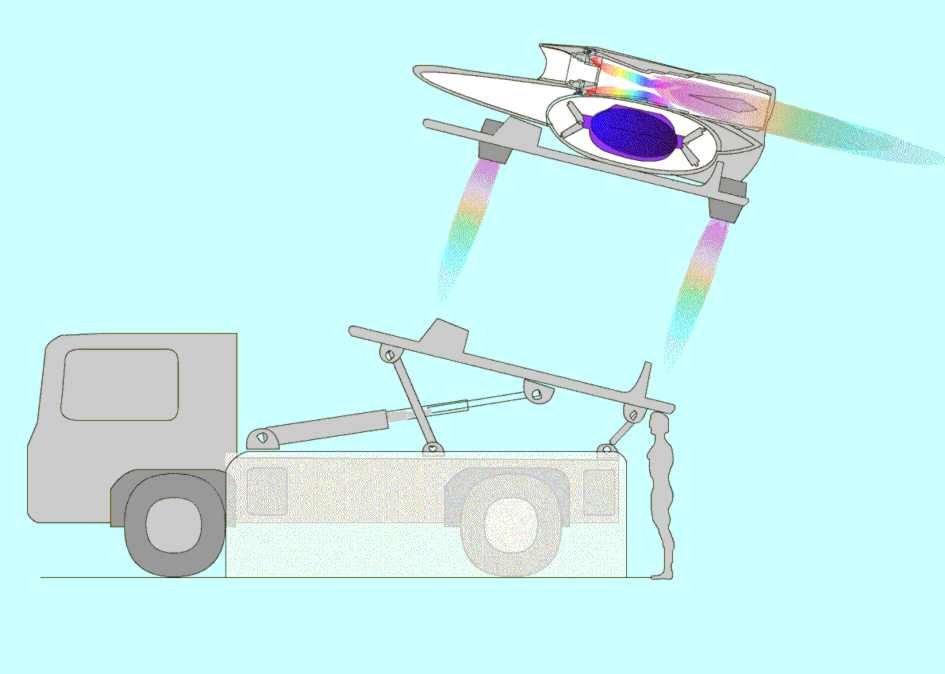
Выбранная схема управления позиционированием позволяет просто отстреливать стартовую платформу из транспортного средства простейшими пороховыми ускорителями, и, после выхода двигателя на рабочий режим, производить отстрел стартовой платформы от дрона.
Гироскопический момент вращающегося с высокой скоростью, 800 килограммового заряда достаточен для того, что бы пренебречь влиянием несинхронности двигателей, отстреливающих платформу, на стабильность системы дрон-пусковая платформа на нулевых и малых скоростях полета и дестабилизирующие моменты, возникающие при их разделения.
После разделения, крылатый снаряд выходит на рабочую высоту. В зависимости от особенностей рельефа местности - от трех до пятнадцати метров, в дозвуковом режиме полеты и, как я уже описывал в предыдущих частях, выполняя маневрирование по сложной программе в стиле "летучая мышь" выходит к рубежу досягаемости ствольных систем и ПВО малой дальности, прикрывающих станцию обнаружения и наведения стратегической ПРО.
Малая высота полета, трудно предсказуемые изменения маршрута и "прикрытие" высокотемпературной составляющей джета, инжектируемого прямоточного двигателя, низкотемпературной паровой рубашкой затрудняют точное определение точки его выхода к позициям ПВО цели.
Преодоление ближнего рубежа ПВО цели осуществляется в режиме больших разгонных перегрузок и на сверхзвуковой скорости.
Перед выходом на такой режим, дрон, как уже было сказано выше, изменяет свою геометрию, отстрелом части несущих поверхностей.
Выходя на позицию непосредственного поражения цели, дрон сбрасывает/отстреливает все ненужные для выполнения режима максимальной скорости элементы и переводит двигатель в чисто прямоточный режим, с высоким числом "М", а, затем, выполняет маневр, который требуется, что бы обеспечить правильное формирование облака аэрозолей или отрезков нитей, формирующееся при разрушении боевой части.
Разгон на заключительном этапе, для порыва ПВО ближнего действия производится с трудно предсказуемого направления и на слишком малой высоте для его перехвата сверхзвуковыми ракетами земля-воздух или воздух-воздух.
Применение ствольной артиллерии и ракет земля воздух ближнего радиуса действия затруднено из-за высокой сверхзвуковой скорости и недостаточности времени на обработку информации и захват цели.
При выходе в точку порыва, происходит разрушение прочного корпуса заряда в результате подрыва специальных инициаторов и ротор, состоящий из взрывчатого компонента, летящий со сверхзвуковой скоростью начинает разрушаться под действием центробежных сил.
Такое разрушение, в случае использования твердотельного реагента, дополнительно ускоряется сбросом давления/вскипанием заполнителя, находящегося в порах между нитями, из которых намотан ротор заряда.
При разрушении заряда, в воздухе образуется мелкодисперсное облако частиц реагента, имеющее достаточно большую протяженность и форму обратной капли, направленной вогнутой стороной на объект атаки.
При правильно выбранных точках инициации, ударная вона сформированная подрывом восьмисот килограмм аэрозоли, имеющей форму, обеспечивающую концентрацию, под углом вниз к направлению движения, ударной волны, способна уничтожить станцию ПРО любого современного типа.